نظام روبوت ذكي لخدمة الكافيه باستخدام ROS2

تفاصيل العمل
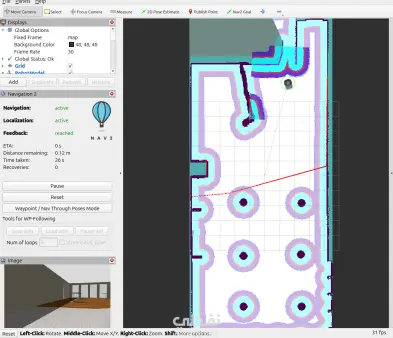
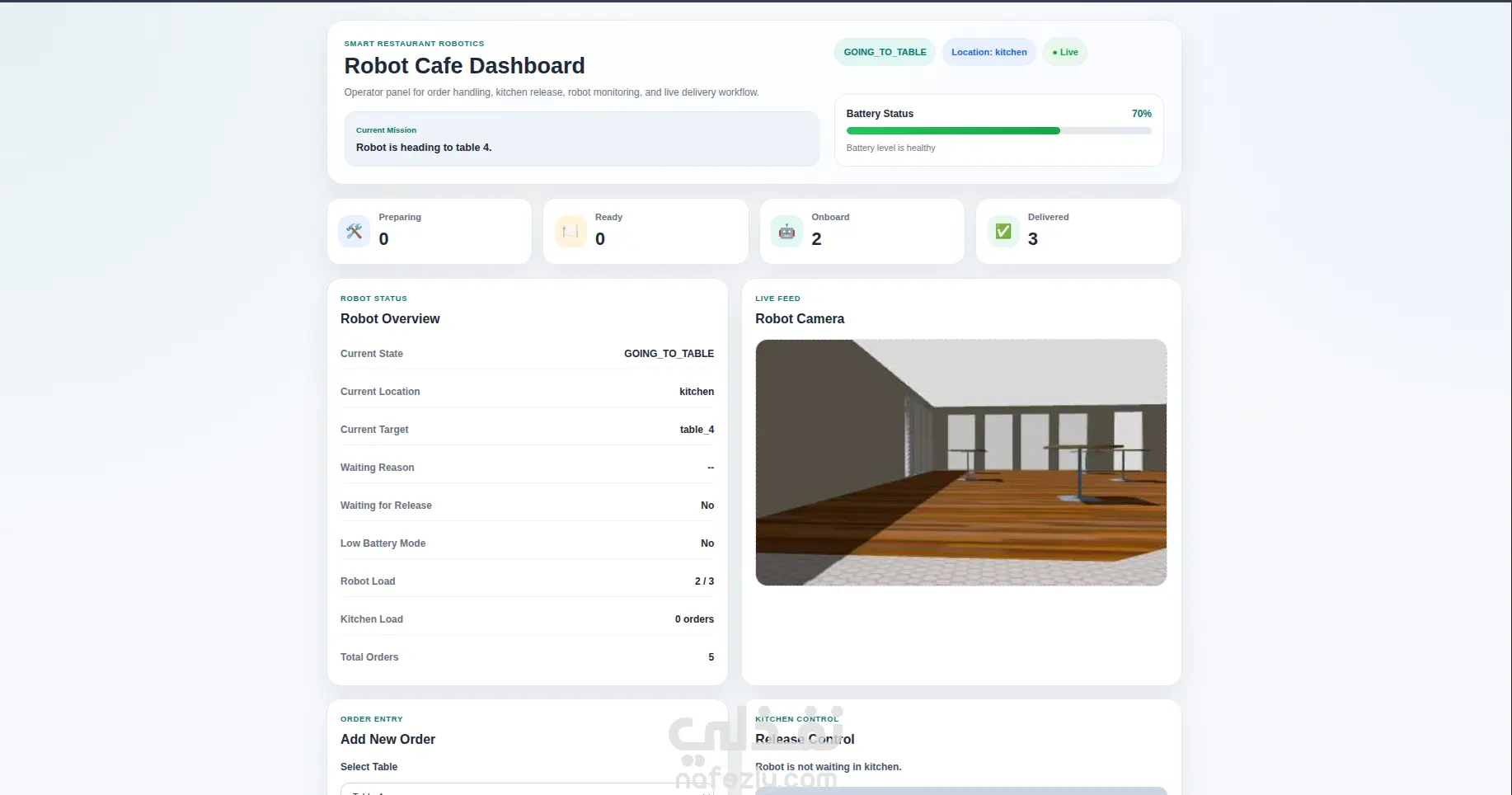
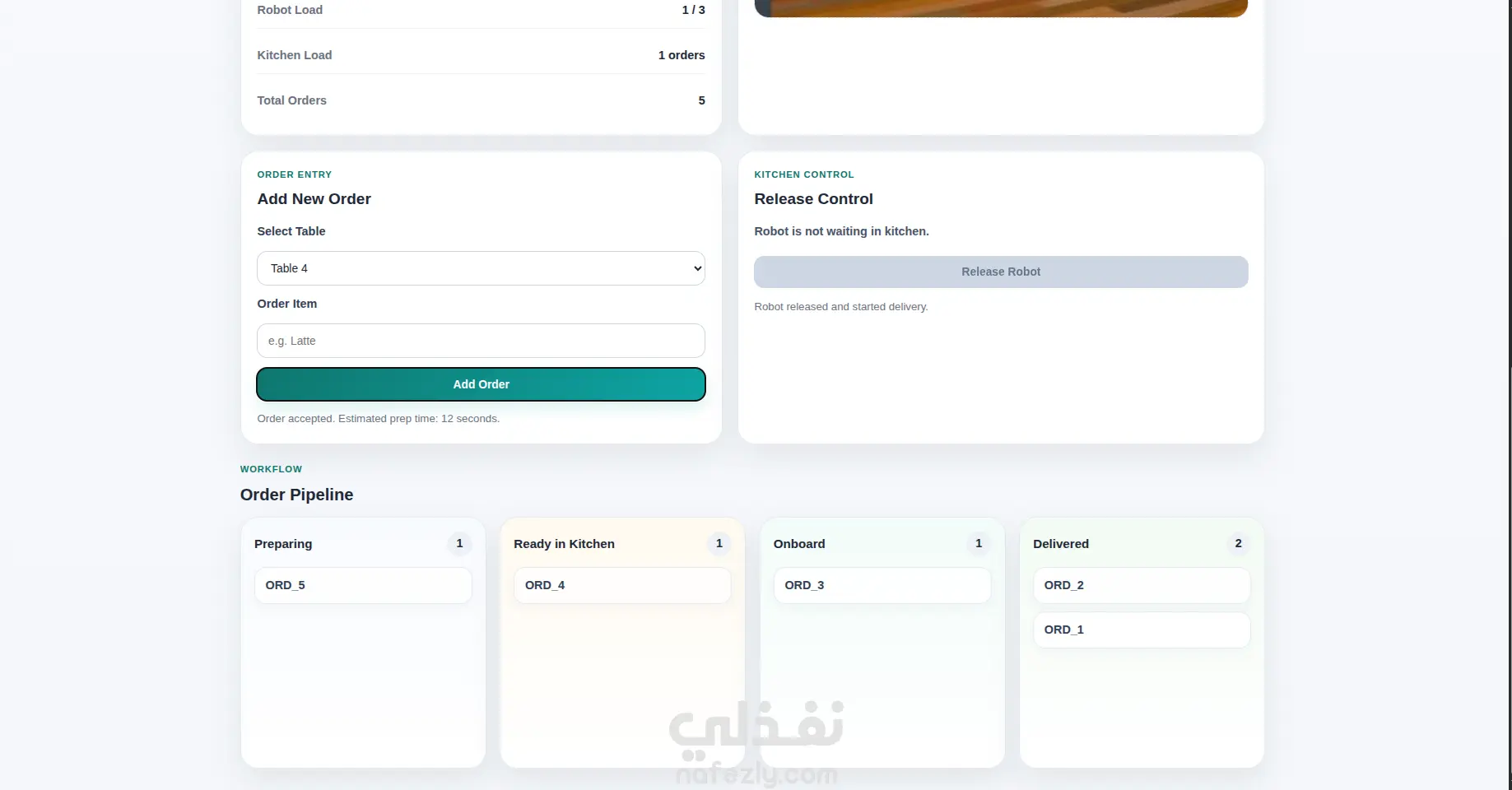
قمت بتطوير نظام روبوت متكامل لمحاكاة روبوت يقدم خدمات داخل كافيه بشكل ذاتي باستخدام ROS2 وGazebo. 🔹 ماذا يفعل النظام؟ * التنقل الذاتي داخل البيئة (Autonomous Navigation) * استقبال الطلبات وتنفيذها * توصيل الطلبات للطاولات * عرض حالة الروبوت لحظيًا * بث مباشر من كاميرا الروبوت * محاكاة كاملة لبيئة كافيه (مطبخ – طاولات – شحن) 🔹 أهم ما تم تنفيذه: * تصميم الروبوت باستخدام URDF/Xacro * دمج حساسات LiDAR و IMU و Camera * استخدام EKF لدمج بيانات الحساسات وتحسين تحديد الموقع * إعداد Navigation2 للتحكم في الحركة الذاتية * بناء نظام إدارة مهام (Task Manager) لتنظيم الطلبات * تطوير واجهة ويب باستخدام Flask للتحكم والمتابعة 🔹 قيمة المشروع: هذا المشروع يمثل نظام متكامل يمكن تطبيقه في: * المطاعم الذكية * روبوتات التوصيل * المستشفيات والأنظمة اللوجستية
مهارات العمل
بطاقة العمل

طلب عمل مماثل