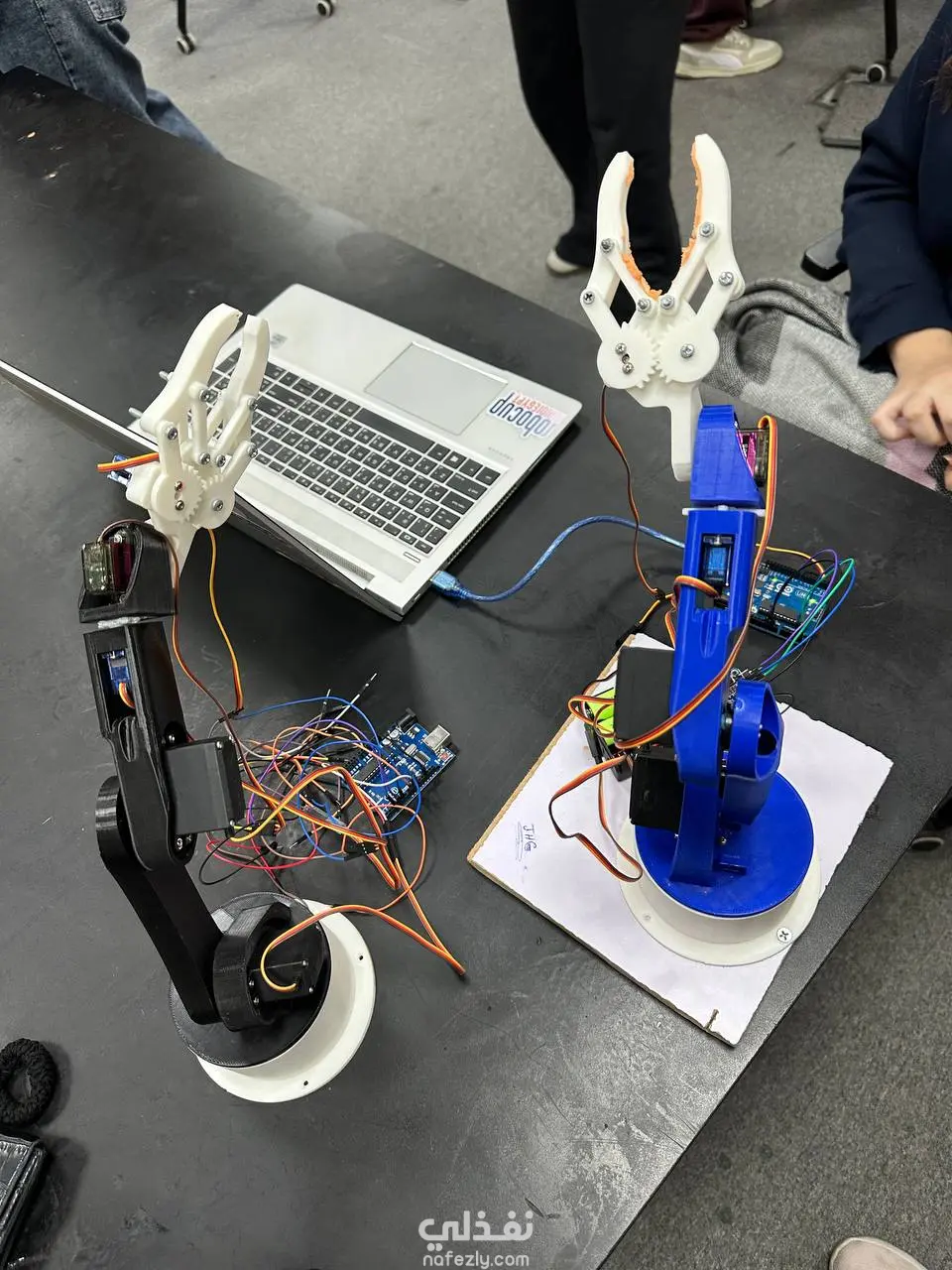
Basyoni Robotic Arm | Robotics Project
تفاصيل العمل
• Developed 6DOF robot arm with autonomous inverse kinematics on Arduino Uno. • Implemented rotation matrix algorithms for position/orientation control (±2mm accuracy, ¡10ms computation). • Integrated 6-servo system via PCA9685 driver with 7.2V Li-ion power management
مهارات العمل