تطوير خوارزميات التحكم الذكي للروبوتات ذاتية القيادة (Embedded Control Logic)
تفاصيل العمل
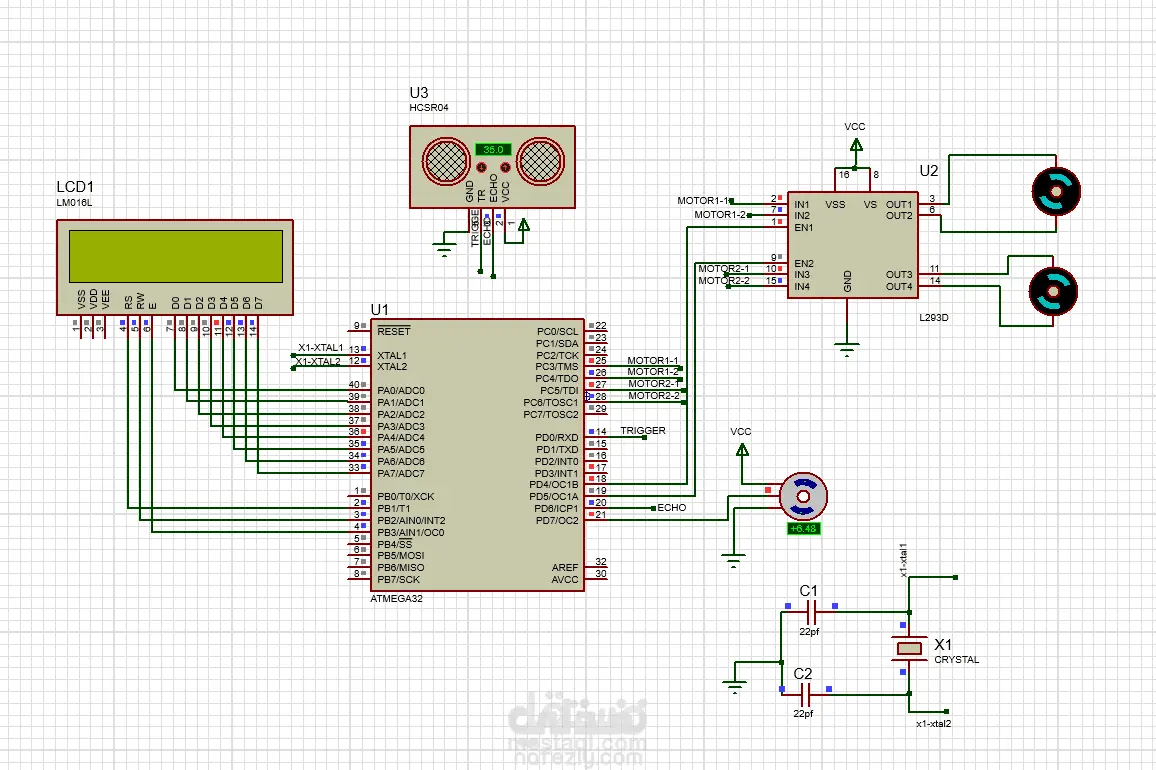
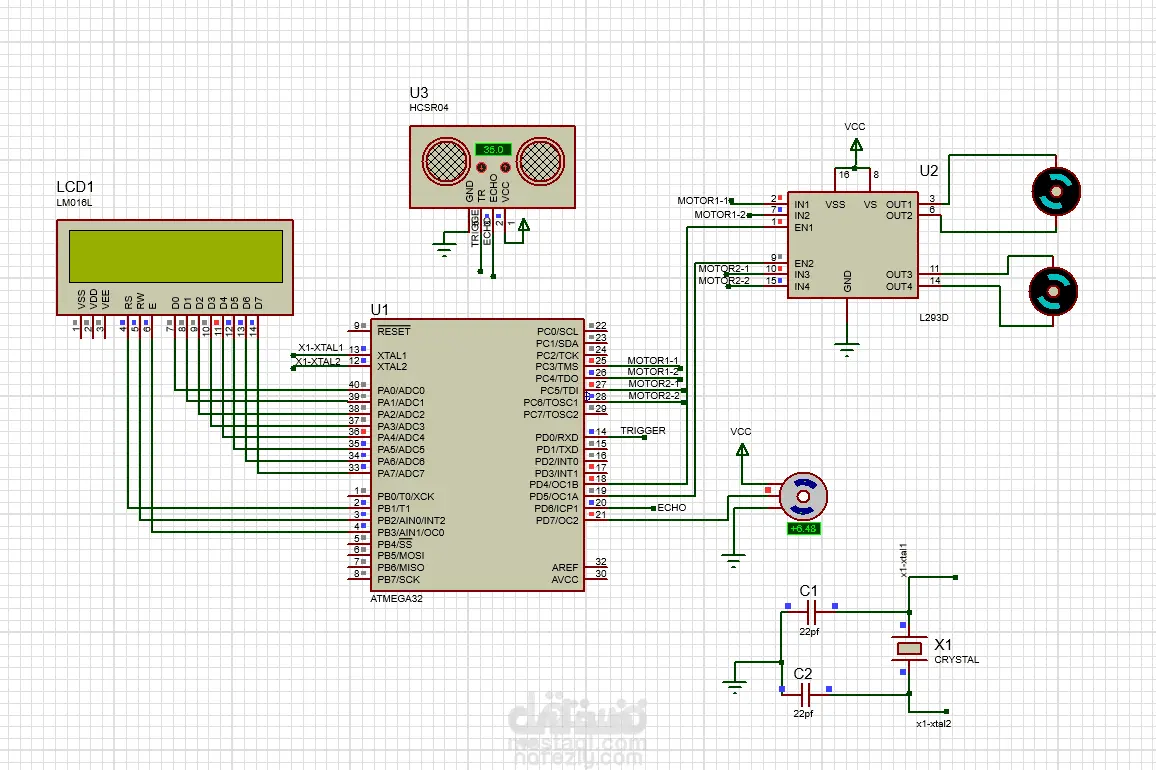
تصميم وبناء النظام البرمجي المسؤول عن الملاحة الذاتية وتجنب العقبات في الوقت الفعلي (Real-time). يركز المشروع على كتابة "المنطق البرمجي" (Control Algorithms) الذي يحلل إشارات الحساسات ويتخذ قرارات التوجيه والمناورة آلياً. المهام البرمجية التي تم تنفيذها (تنفذ عن بُعد): - برمجة المستوى المنخفض (Bare-metal Programming): كتابة الكود المصدري باستخدام لغة Embedded C للتعامل المباشر مع معمارية المتحكم ATmega32 لضمان أعلى سرعة استجابة. - تطوير خوارزمية تجنب الاصطدام: بناء منطق برمجبي يعتمد على معالجة البيانات الواردة من الحساسات واستخدام الـ Interrupts لضمان استجابة النظام الفورية للعوائق. - التحكم الرقمي في المحركات (Speed Control): استخدام تقنية PWM برمجياً للتحكم في سرعة واتجاه الروبوت بشكل دقيق وسلس. المخرجات الرقمية للمشروع (Digital Deliverables): - الكود المصدري الكامل (Source Code) المنظم والموثق. - مخطط الدائرة الإلكترونية الرقمي (Schematic Design) الموضح للتوصيلات المنطقية. - ملفات المحاكاة (Simulation Files) التي تثبت نجاح الخوارزمية برمجياً قبل التنفيذ.
مهارات العمل
بطاقة العمل

طلب عمل مماثل