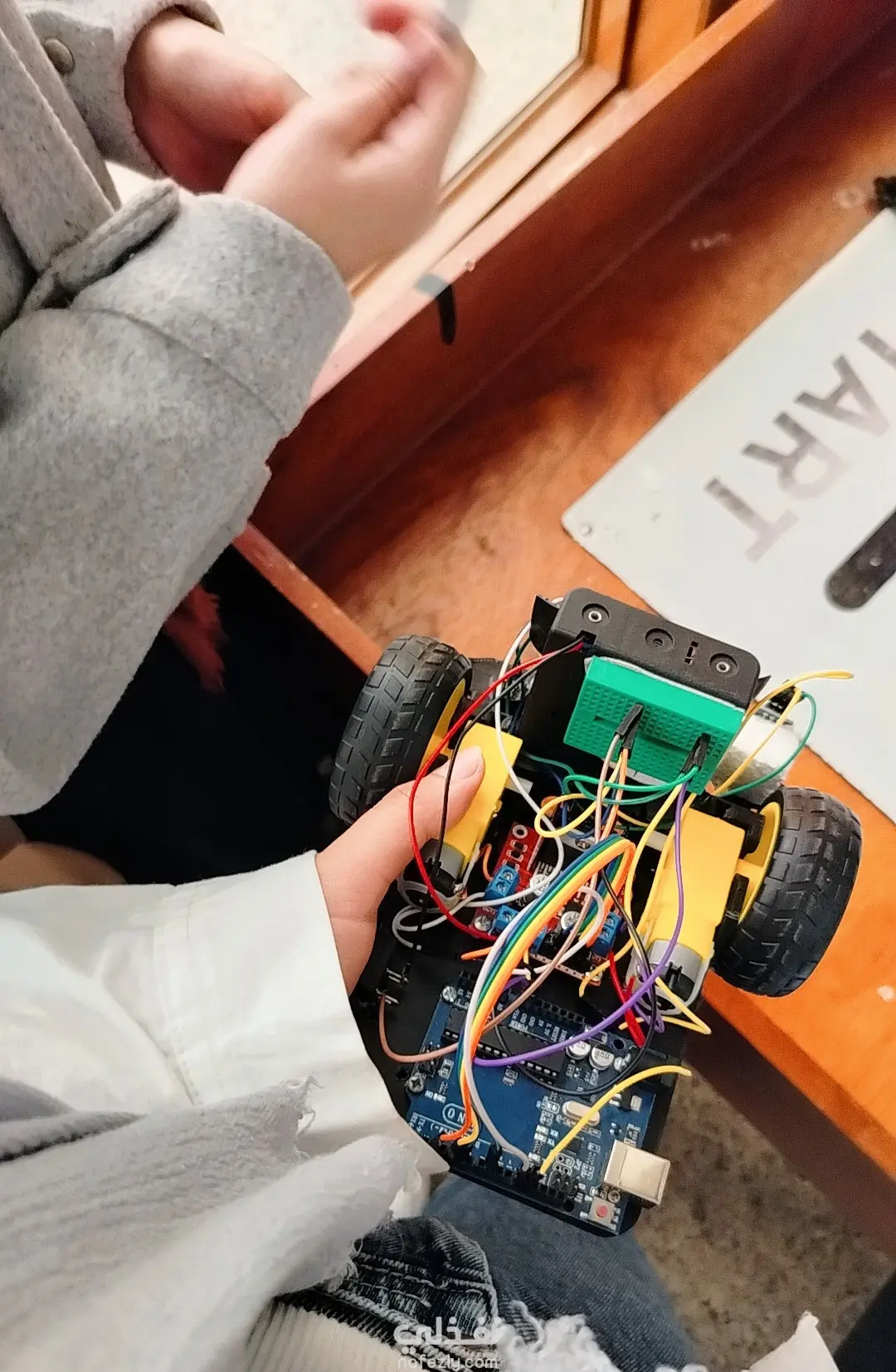
تصميم وتنفيذ روبوت متتبع للمسار (Line Following Robot) باستخدام Arduino 🤖
مشروع يهدف إلى تتبع مسار محدد بشكل تلقائي من خلال حساسات الأشعة تحت الحمراء التي تقوم بقراءة موقع الخط في الزمن الحقيقي، ثم إرسال الأوامر المناسبة للمحركات لضمان حركة دقيقة وسلسة. تم الاهتمام بكفاءة التحكم وسرعة الاستجابة لتحقيق أداء ثابت وموثوق.
✔ برمجة المتحكم باستخدام Arduino
✔ توصيل ومعايرة حساسات IR
✔ التحكم في حركة المحركات واتجاهها
✔ اختبار النظام وتحسين دقة التتبع