مشروع تصميم و بناء روبوت بشري Humanoid Robot

تفاصيل العمل
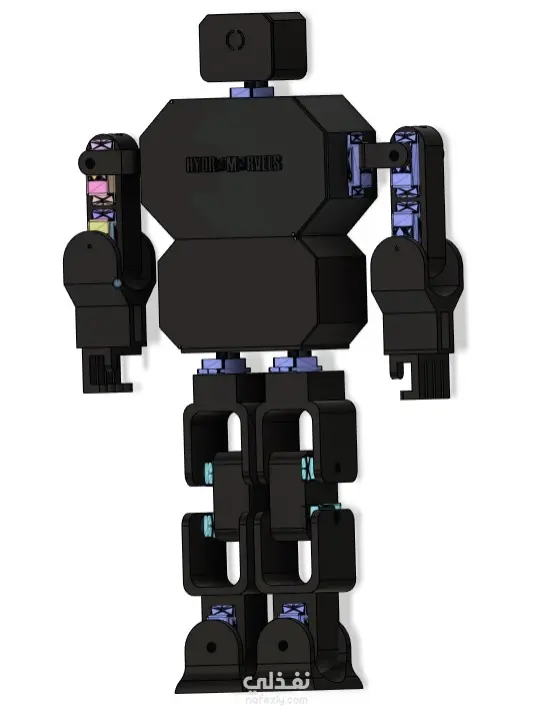
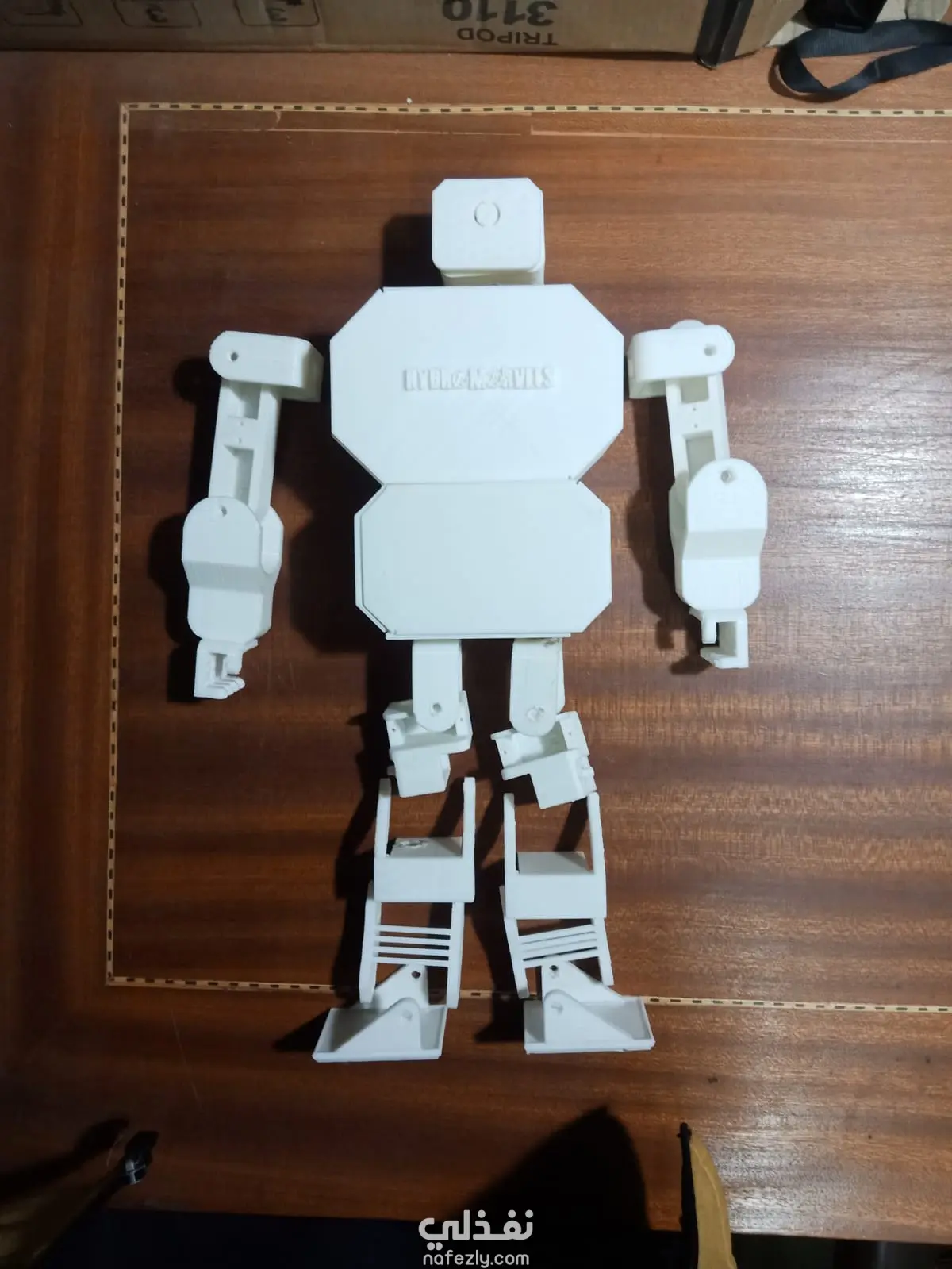
عملت على مشروع روبوت بشري باستخدام عدد 19 سيرفو موتور للتحكم في الحركات المختلفة مثل اليدين، الأرجل، والرقبة. الهدف من المشروع كان تطبيق عملي على مبادئ الميكاترونكس وأنظمة التحكم، مع التركيز على محاكاة الحركات البشرية بطريقة واقعية. المهام التي تم تنفيذها: 1-تصميم النظام الميكانيكي للروبوت بحيث يستوعب 19 محرك سيرفو. 2-استخدام PWM Control للتحكم في زوايا المحركات. 3-برمجة وحدة التحكم (Microcontroller) للتحكم في الحركات وتسلسل الأوامر. 4-إعداد محاكاة للتحكم في الحركات باستخدام برامج متخصصة قبل التنفيذ العملي. 5-تصميم دائرة تشغيل باستخدام PCA Servo Driver لتوزيع التحكم على المحركات. الادوات المستخدمة: Arduino/ESP32 كوحدة تحكم. PCA9685 Driver للتحكم بعدد كبير من السيرفو. برمجة بلغة C/C++ للتحكم في الحركات. برامج محاكاة للروبوت للتأكد من الحركات قبل التشغيل الفعلي
مهارات العمل