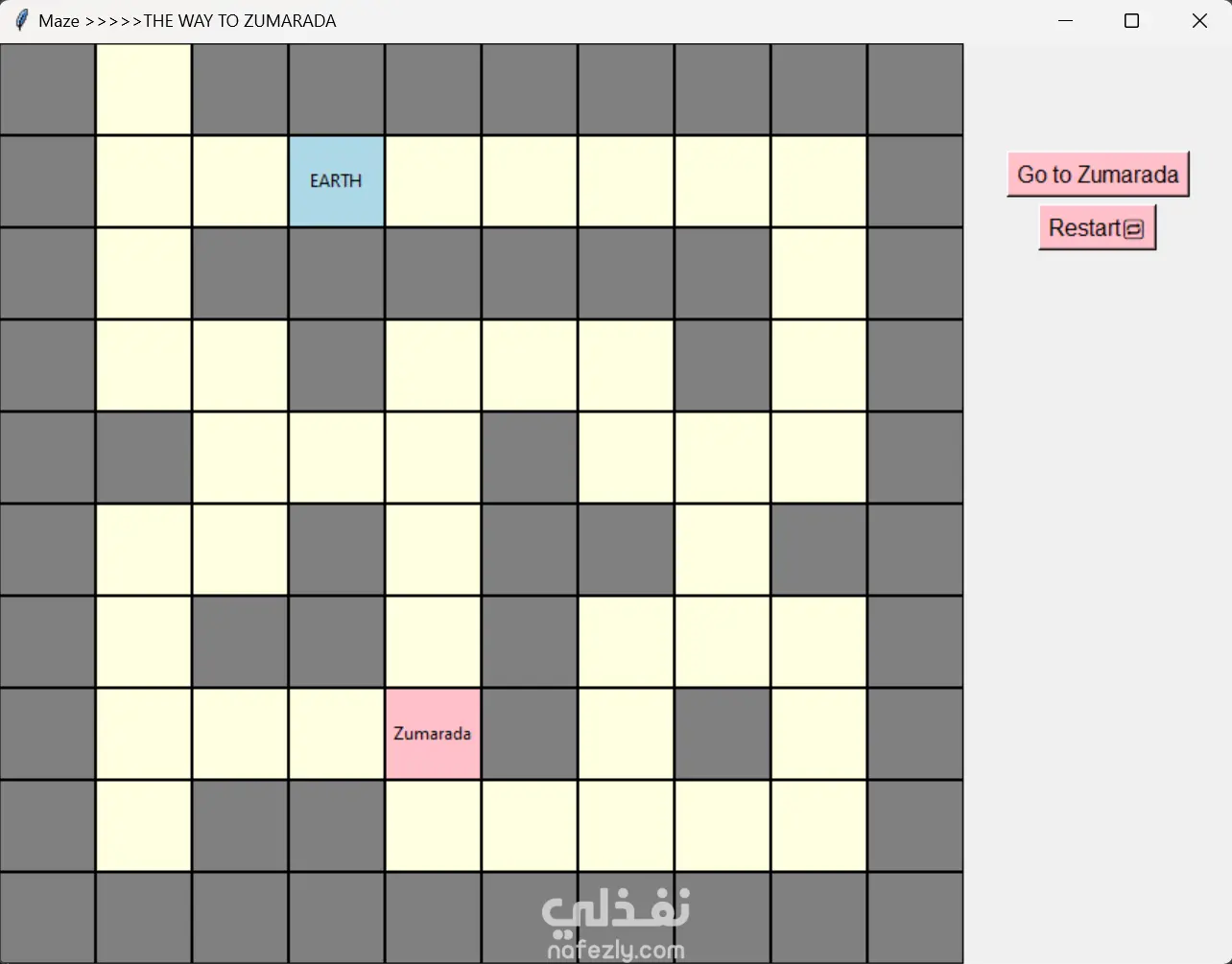
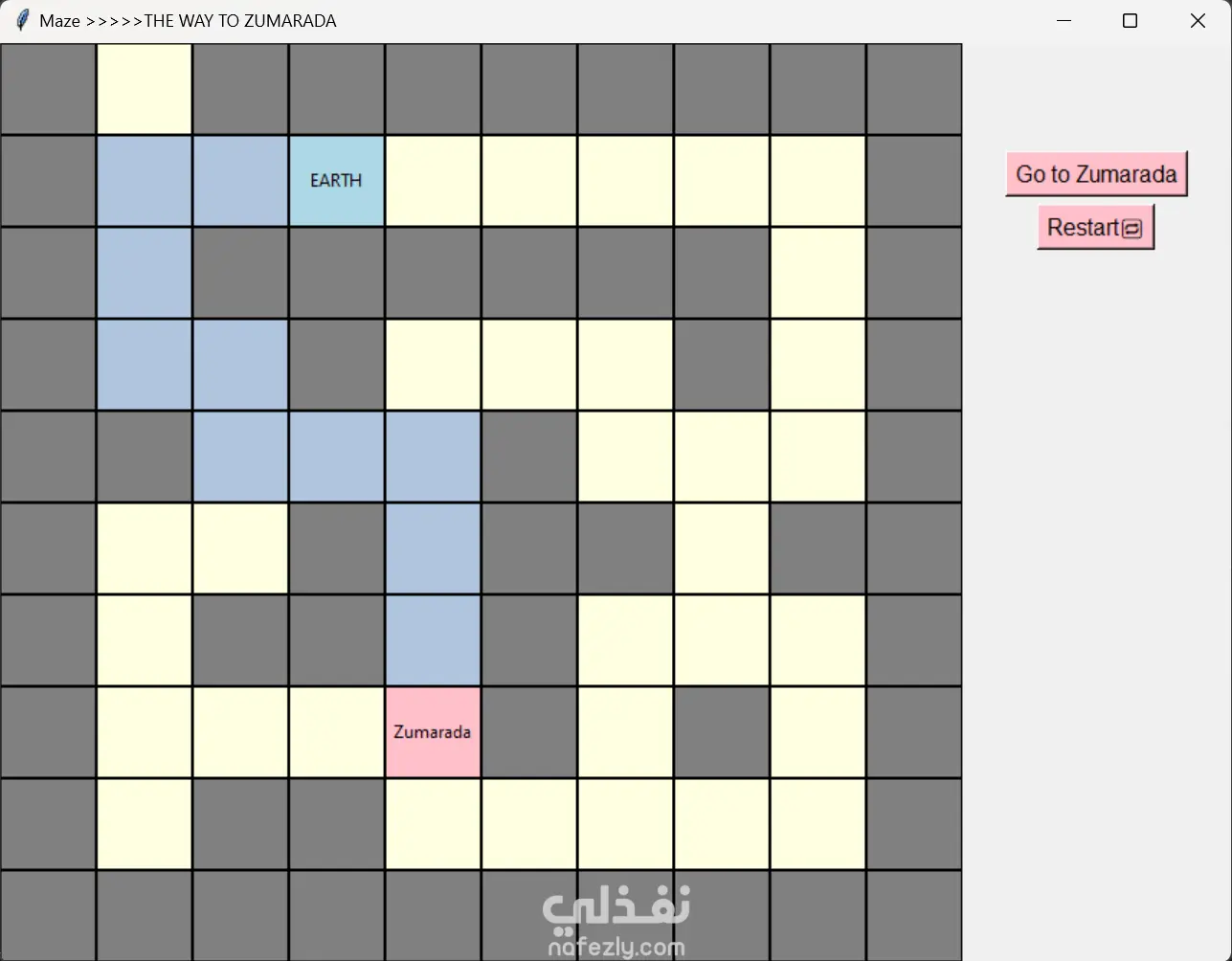
قمنا بمحاكاة حركة الروبوت باستخدام خوارزمية BFS، مع واجهة رسومية (Tkinter GUI) لعرض المتاهة وتحريك الروبوت أثناء البحث عن المسار.
دوري كان:
اختيار الألوان لتوضيح المسارات والعوائق.
تنظيم المتاهة (تحديد البداية، الهدف، والعوائق) بشكل مناسب لعرض الخوارزمية واختبارها.