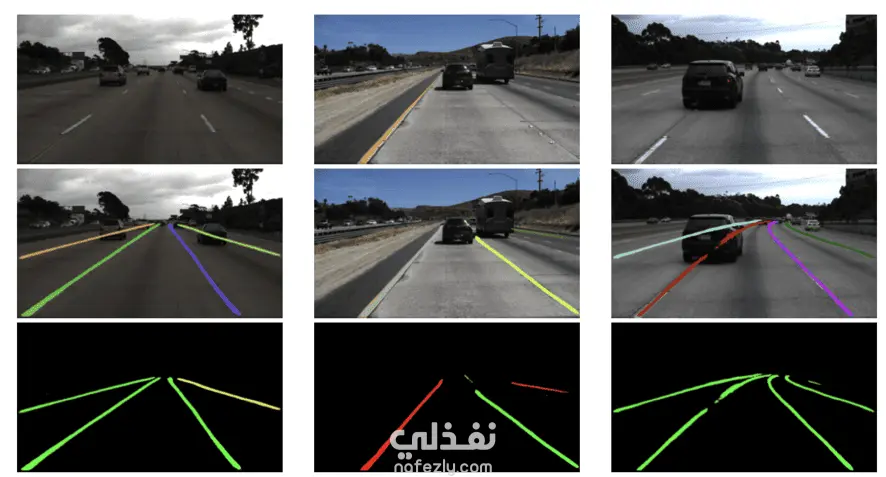
Lane Detection for Autonomous Vehicles
تفاصيل العمل
مشروع اكتشاف المسارات باستخدام الذكاء الاصطناعي في هذا المشروع قمتُ بتطوير نظام لاكتشاف مسارات الطرق (Lane Detection) بالاعتماد على لغة Python ونموذج YOLO11 للتعلم العميق. قمتُ بجمع ومعالجة بيانات مكونة من صور ومقاطع فيديو للطرق، ثم درّبت النموذج للتعرّف على المسارات بشكل دقيق في مختلف الظروف. يهدف المشروع إلى دعم تطبيقات أنظمة القيادة الذاتية ومساعدة السائق (ADAS).
مهارات العمل