مشروع جامعي Hexapod robot

تفاصيل العمل
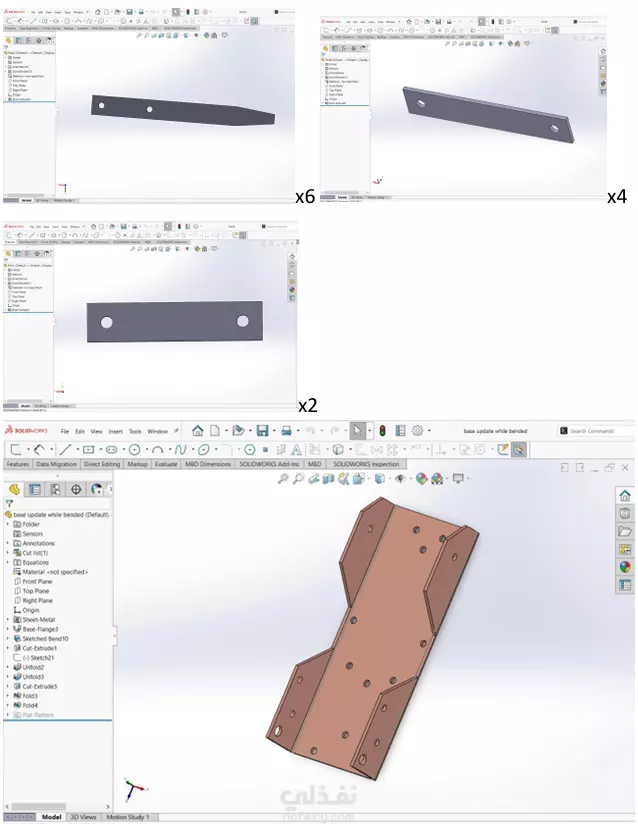
تم تصميم وتنفيذ روبوت بسيط قادر على الحركة باستخدام مكونات أساسية مثل linkages، موتور، بطارية. بدأ العمل برسم جميع الأجزاء على برنامج SolidWorks، ثم طباعتها باستخدام تقنية 3D Printing، وبعدها تم تجميع القطع مع بعضها وتوصيلها بمفتاح تشغيل للتحكم في عمل الموتور وحركة الروبوت. الهدف من المشروع هو تطبيق عملي على مادة Theory of Machines لفهم آليات الحركة والربط بين التصميم الميكانيكي والتنفيذ الفعلي، مما يساهم في تكوين قاعدة قوية تساعد مستقبلاً عند استخدام تقنيات الذكاء الاصطناعي للتحكم في الروبوتات أو أي جهاز ميكانيكي آخر.
بطاقة العمل

طلب عمل مماثل